

仮面ライダーBLACK SUNの変身ベルトである、サンドライバーという変身ベルトの修理依頼がありました。
変身の効果音と変身時の変形ギミックの動作において、変身動作でかざした手に反応するセンサーが反応しないということと、センサーに反応しないので、ギミックの変形もしないということです。
修理作業中にお聞きしたのですが、中古で購入をされ、購入当初は動作確認をしていたそうです。
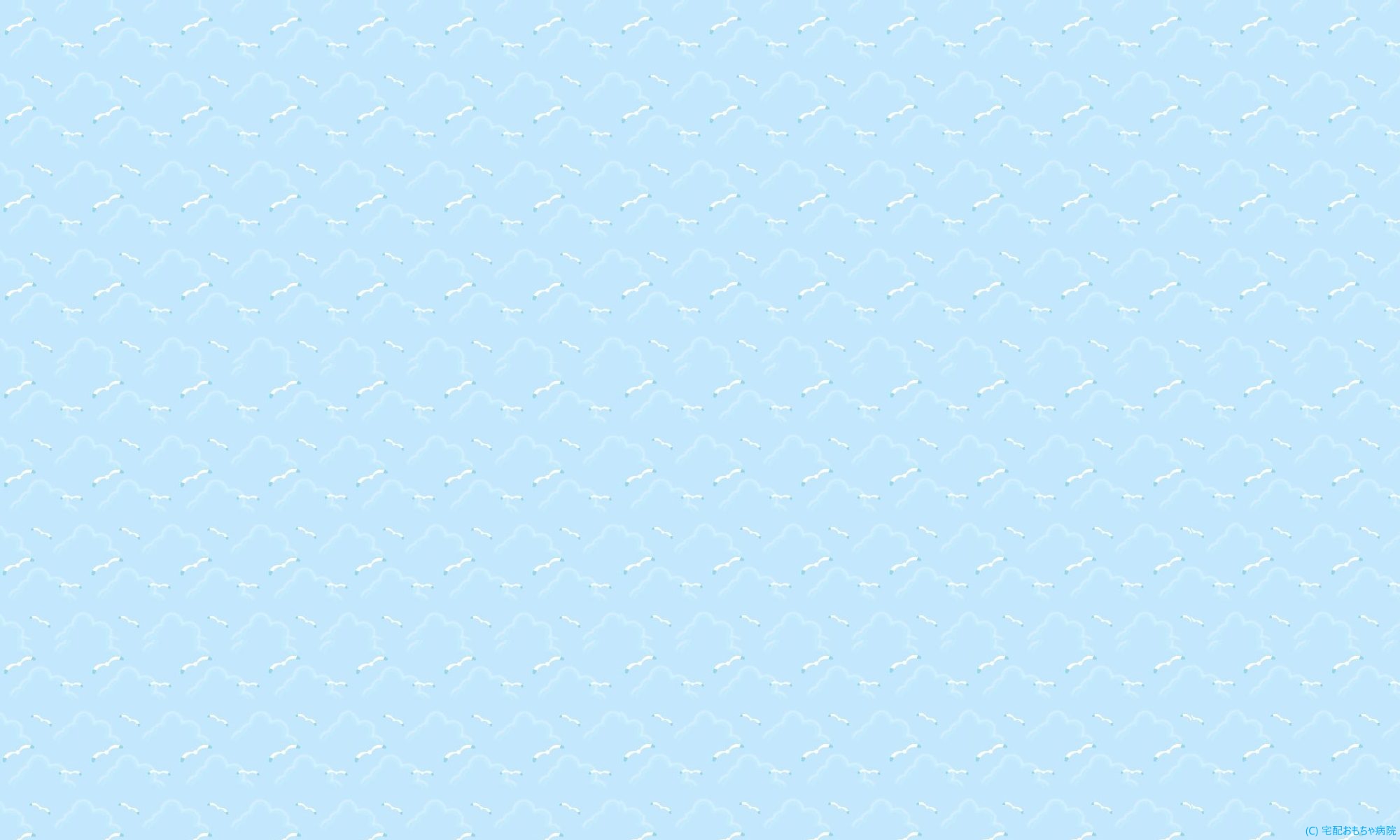
分解すると、稼働用のモーターの導線の半田付けが取れており、ヨリ線が単にモーターの端子に結わえてあったという始末です。
おやおや
┐( ̄へ ̄)┌
明らかに誰かの手が入っています。
中古で購入したそうですが、何か闇がありそうです。

とりあえず半田付けしておきます。
さて、この変身ベルトは、ベルト上部に赤外線センサーが付いてあり、手をセンサーにかざすという変身の仕草でギミックが動作するという代物です。
センサーの不具合もあるとのことで、センサーを確認します。

赤外線の照射と受信のモジュールが両端に付いています。
かざした手に反応するだけでいいので、赤外線の照射とその反射の有無だけを感知しているだけだと思われます。
では、実際に電源を入れて変形モードに入れて赤外線センサーの照射を確認します。


両側の赤外線の照射問題ありません。
というか、実際に手をかざして変身動作をすると、
シュワ!
ガサガサ…。
とかざした手に反応し効果音も鳴りLEDが点灯します。
あら!?
赤外線センサー反応してるじゃん!
ー_-;
ですが、ギミックがうんともすんともです。
効果音が鳴りLEDもバーッと点灯しますが、ギミックがうんともすんともです。
この赤外線センサーも数種類のアクションに対して反応するらしく、取り扱い説明書を参考にいろいろ試してみましたが、赤外線センサーの反応は問題なさそうです。
ということで、ギミック側の動きに問題がありそうです。
ギミックの動きとしては、以下があります。
- 電源ON時に前面のアナログメーターがガガガと動く。
そんで、変身モードに入り変身の素振りが完了すると、
- ベルト中央が回転し開いていた羽が閉じる。
- 上部のスライドカバーが閉じる。
- 下部の開閉カバーが閉じる。
となります。
効果音には、セリフやBGMなど、恐らくドラマを彷彿させ演出を盛りだてる要素盛りだくさんです。※かなりのリアリティです。
基本、初期状態では、各種のギミックは開いた状態になります。
というのも、分解し各所を調べていると、各可動ギミックの初期状態を検知するスイッチが各所に仕込まれており、初期状態にないと初期状態の位置になるようにモーターを稼働させ動きます。
そうなのです!
分解し稼働部をいじっていると、自ずと初期状態の位置から動いてしまうのですが、電源を入れるとモーターが可動し初期状態の位置まで動かします。
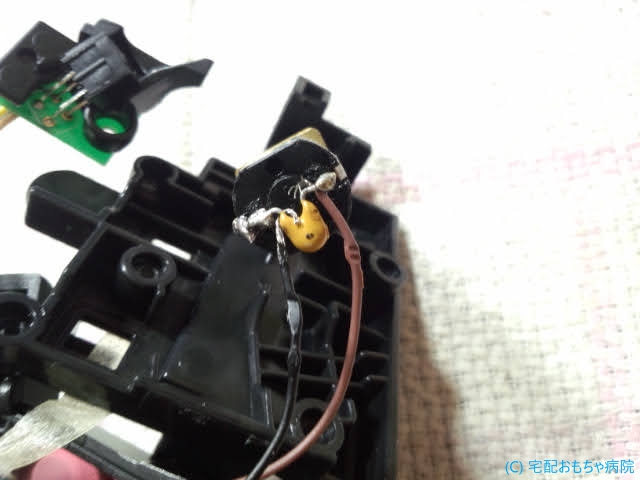
ここで、内蔵の4つのモーターとギアは動くことが自ずと確認できました。
そのモーターを制御しているモータードライバも制御信号を出しているマイコンIC側も動作していることは分かりました。
さらに、検知スイッチで初期状態の位置をも検知できている。
といろいろと確認することができました。
おやおやおや、諸々動作不良の原因と思っていた箇所のほとんどが正常ということが判明してしまいました。
┐( ̄へ ̄)┌
あららら、ギミックが動かない原因を、もっと突っ込んで解析しないとだめです。
センサーも無事、モーターも無事でモータードライバも制御ICも問題なさそうです。
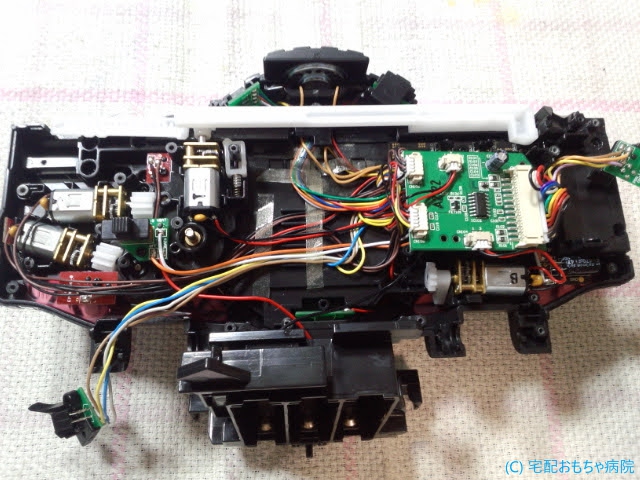
では、バラバラに分解してメカニズムを解析しないといけませんが、この本体内部はどうなのよ。
基板や配線がぎっしりです。
バラバラにしたら、元の戻せる自信がない。
依頼者に了承を得て、さらなる解析において元に戻せないリスクも許容の上、さらに分解を進めました。
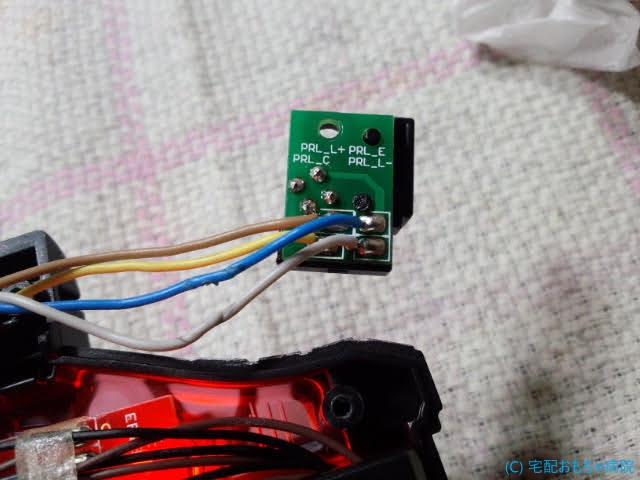
本商品の基本構成は、2枚の基板に主要が構成要素が詰め込まれています。
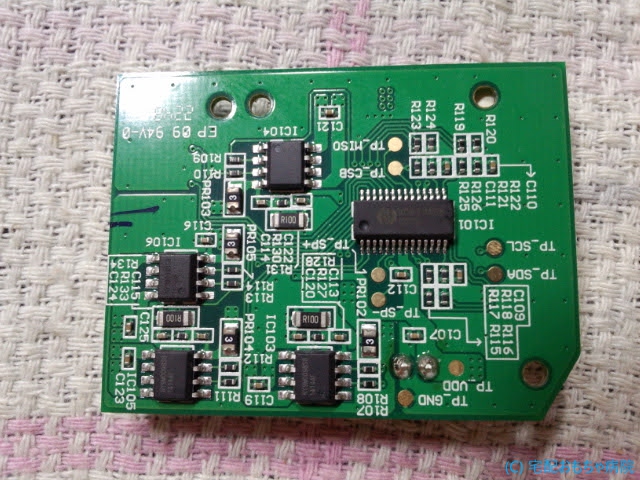
まず、分解してすぐ見える緑のプリント基板は、モータードライバと制御ICの基板です。

マイコンは、Nyquest TechnologyのNX13Fが使われています。
その下に黒い基板があり赤外線センサー制御と各ギミックの位置検知スイッチからの信号を受けモータードライバ側の基板に信号を迂回しています。
さらにLEDの制御も担っております。
変身に際しては、変身動作の認識も赤外線センサーからの信号を受けています。
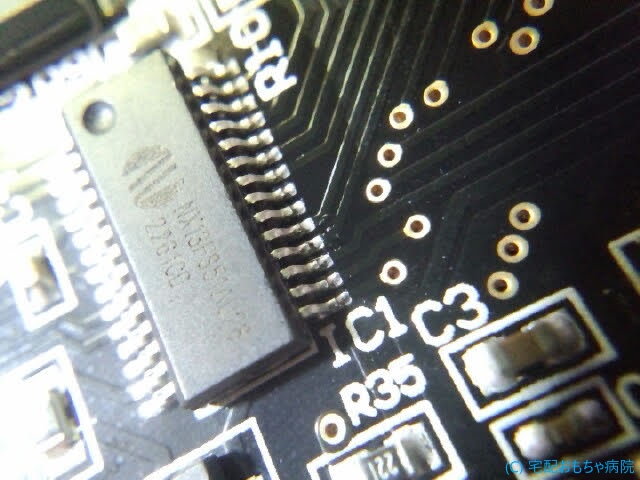
マイコン同じは、Nyquest TechnologyのNX13Fが使われています。
この両基板にあるマイコン同士が通信し各センサーから信号を受け認識し、各所のギミックの動き制御をしています。
ここまでをササっと調べ上げておきます。
今回の現象を考えると、赤外線センサーからの信号を黒基板側のセンサー用マイコンで受信解析し、変身動作の完了でモータードライバ側のマイコンへ命令を出しモーターを稼働させ変身動作のギミックを動かすという流れと思われます。
なるほど、では、今回のようなギミックの変形動作をしないということになると、この変身動作の命令を出していないか、受け取れていないかという線が強そうです。
ではマイコン間の通信を解析します。
マイコンの仕様書を確認すると、通信のI/Fとしては、シリアルとI2C, SPIなんかあります。
よくある、TX,RXのシリアルなんかは良くマイコン間の通信に使いますよね。
オシロを使って変身動作時の各I/Fの信号を観測すると、シリアルで変身動作の命令を出しているのが分かりました。
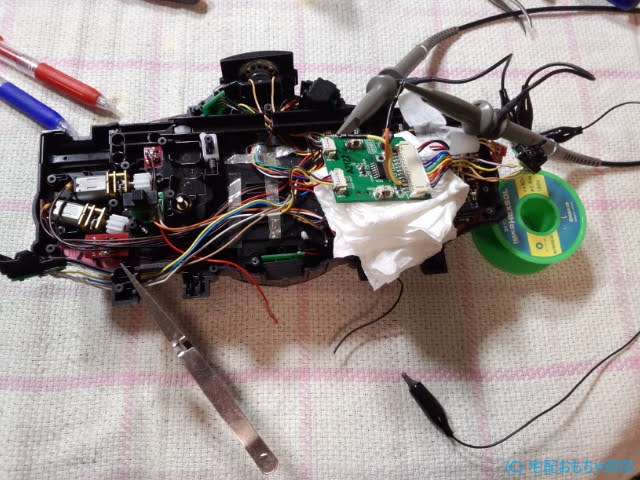

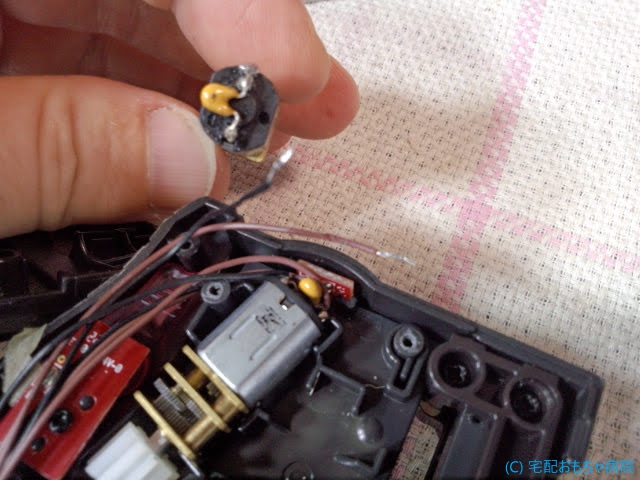
基板間をつないでいるコネクタの端子とTX, RXの接続を調べ観測します。
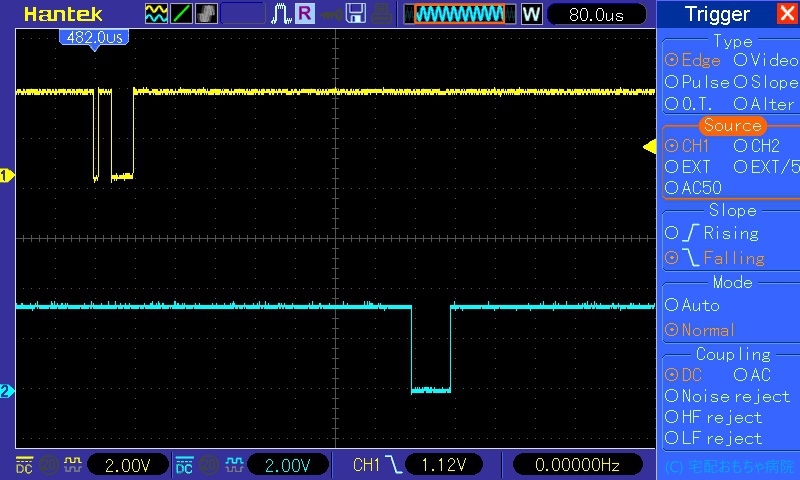
緑のプリント基板のモータードライバを制御しているマイコンから見た方向で1chの黄色が、RXで2chの水色が、TX信号です。
起動時にTXに1パルスをのせてハンドシェイクをしていそうです。
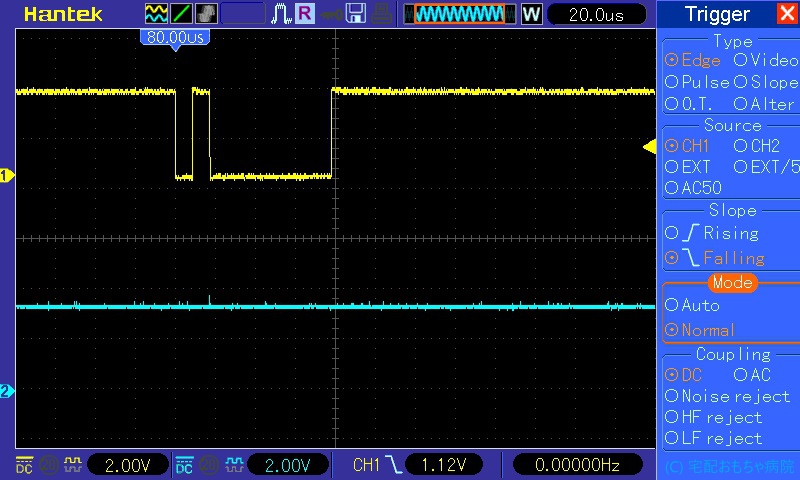
変身の手振り動作が完了すると、センサーマイコン側からギミックの動作命令が発行されます。
1chの黄色いパターンになります。
手振りが完了すると発行されています。
この命令をモータードライバ側のマイコンが受けれていないと推測されます。
センサー側のマイコンが、正常なパターンの発行できているとすると、モータードライバ側のマイコンで認識できていないと思われます。
依頼者からは、購入時の動作は問題なかったとのことなので、恐らくオシレータのタイミングがズレて発行した命令を認識できなくなっているという事態と思われます。
もちろんですが、命令を発行するマイコン側のタイミングズレの懸念もあるので、いづれにしてもこの命令パターンの送受信ができなくなったという不具合ということであると思われます。
マイコン間の通信不良となると、そもそも命令の正当性やタイミングなどの情報は、製品の設計情報なので、これ以上の解析は難しいです。
また、もしシリアル通信のタイミングズレだとしても補正できる術もあるのかどうかも分かりません。
緑基板の替えでもあればですが、無理ですね。
この辺りが、故障解析の限界のようで、残念ですが依頼者には修理不可能ということで返却させていただきました。
で!
そもそも中古で購入された商品ですが、何か修理痕もあるので不可思議な点も多い案件でした。