
本日は、先日当医院ホームページの読者のおもちゃドクター様から頂いたご質問について掲載しようと思います。※以前のスタッフブログの移設再掲になります。

スタッフブログへ、COBって?という記事を掲載していますが、そのCOB内素子に関するご質問となります。※記事の中で、特段明記しない場合は、COBの中身は半導体素子がパッケージされているとします。
再掲ですが、COBという名前の電子素子は存在しません。COBとは、基板上にモールドするというパッケージの手法を指します。誤用しているおもちゃドクターの多いこと。
さて、ご質問ですが、COB内部の素子が、故障しているという判断基準についてと、正常に動作しないおもちゃに実装されているCOB部分に熱を加えたら動作し始めたという巷で呼ばれている『ヒートショック療法』についてどのように考えるかというご質問でした。
1)COB内部素子不良の判断基準について
COBパッケージが用いられたおもちゃを修理する際ですが、まずはじめにおもちゃの動作仕様から、COB部分が、どのような動作機能を担っているかを的確に推測できるかが鍵になるかと思います。
おもちゃの機能仕様や設計仕様がないため、COB部分は完全なブラックボックスとなりますので、正常な動きをする場合、該当のCOB部分が、どのような機能を担いどのように動作しないといけないという推測しなければなりません。
非常に大事です。
機能の推測ができれば、そのブラックボックスへの入力と出力を観測します。
与えられている入力に対する出力が、正しく出ているかという点となります。
入力例:電源, GND, センサーからのアナログ入力や、プッシュスイッチのHi/Low、外部発振回路など。
出力例:液晶信号やスピーカーへの音声やモーターへのPWM波、LEDへの電圧など。
COB内部の素子が、制御LSIなどで通信相手がメモリや周辺のLSIなのであれば、さらに複雑化します。
これら推測された、入力信号が正常に与えられてあったとしても、期待した出力が得られていない場合、COB内の素子の機能が正常に動いていないと結論づけます。
だいたいここで、修理不可能という判断かと思います。
そもそも、出力信号が観測できないような基板構造である場合も多く、そのような場合も診断不可能という判断になります。
ですが、正直なところ一切の仕様書がないので、この推測も外れている可能性も否定できず、皆様のインターネットの修理記事を参考にしたり、自身のスキルでできる範囲で最大の努力をしてもなお、解析できず断念する場合も多いです。
自身の技量不足として、ごめんなさいをします。
例えば、多層基板の構成で入出力信号が、COBパッケージ直下にVIAとして出ていた場合やリバースエンジニアリング対策で基板一面がシルクで塗装されていたりすると、信号の解析すらできないです。
初代たまごっちなどのように COB内の1chip ICで液晶や音声、ボタンの入力などを一手に担ってる場合が該当しますね。
以前、他のおもちゃドクター様の記事を拝見した際に、『また、COBのせいにするのですか?』という、解析を断念したドクターへの指摘記事を拝見しました。
修理を担当したドクター様の技術スキル不足で、回路の仕様も解析できず、どこが故障しているのかも全く分からない時に、根拠もなく『COB内部の素子が故障している』と安易に結論づけてCOB不良と称し修理不可能としてしまった、ドクターへの指摘でした。
ある意味、免罪符のように使われている事態を自分も懸念しております。
重要なので、もう一度書きます。
本当にCOB素子の故障ですか?
COB素子の故障と結論づけた根拠は説明できますか?
修理不可能ではなく、『担当ドクターの技量不足で、故障診断ができませんでした。ここでは、修理はできませんが、技量のあるドクターか、高度医療のおもちゃ病院なら、修理できるかもしれません。』と、依頼者様へお伝えすれば、そのまま廃棄されず、他のおもちゃ病院なりに相談できたかもしれません。
2024.5.31追記
最近、マイコン換装というキーワードを目にすることが多くなりました。
前述のCOB素子の故障かどうかも解析できないため、根拠なくCOB素子の故障としマイコンで機能を換装してしまおうという診断を諦める方が多いです。
なぜか、不思議にマイコンで換装しようとするのです。
本当は別な要因の故障であったのに、安易にマイコンで機能を換装しようとしていませんか?
適切な修理方法を誤っていませんか?
厳しいことを書くと、マイコンで換装するという行為を神の仕業のようにアピールしたいだけではないですか?
しかも、マイコン換装だとしても、なんでPICマイコンなのですか?
選定基準を説明できますか?
回路とプログラムを丸コピしたいためではないですか?※猿まねと言われても仕方ないですよ!
しかもご自身で回路の仕様を解析もせず、マイコンの選定やプログラム開発も他にお願いするという丸投げ状態になっていませんか?
それって、おもちゃドクターのお仕事ですか?
修理した”つもり”になっていませんか?
換装することになったとしても、自身の開発思想で、どのようなマイコンをどのようにインプリするか検討しブラッシュアップを重ねていけばよいのに、皆おなじ仕様で換装してしまっています。
電子回路の開発経験もなく、もちろんファームの開発経験もない素人が他人の回路とプログラムを丸コピして修理したつもりになっていませんか?
インプリした回路やファームの検証は問題なくできていますか?
丸コピーなので、責任持てませんとでも言うのですか?
もっと腕を磨くことが他にありませんか?
マイコンの仕様書やペリフェラルの仕様など把握できていますか?
英語ですよ!
巷には、Arduinoなど、趣味のマイコン工作グループが多く存在します。
もっと、そのようなグループに飛び込み腕を磨いてから議論していただきたいものです。
RISV-Vのコミュニティーやセミナーに参加したり、もっと知見を広げることもできます。
2)COBへの冷却や加温での動作回復について
COB内の素子に温度係数をもった機能があるということかと思います。
COB内は、半導体のチップがワイヤーボンディングされてあるという前提で回答します。
以下の説明は、かなり半導体に関する技術用語を多用させていただきますが、ご了承ください。
おもちゃの制御を担う場合は、簡易的であれば、マイコンレベルのCPUと汎用IO程度の機能が、外部メモリとの通信やタッチパネルや演算処理を伴う場合は、SoCレベルの周辺機能の充実している半導体が封入されているように思います。
これらの素子で温度係数をもったもので故障の原因と成りうるものとしては、シリコン中のMOSトランジスタや、ワイヤーボンディングのワイヤーおよび封入の樹脂が、まず考えられます。※他にもありますが、この線が有力と思われます。 それぞれについて考察します。
①シリコン上のMOSトランジスタについて
MOSトランジスタは、そもそも以下リンク記事のように温度変化によって挙動が変わりますので、設計段階で使用環境の温度を考慮し設計開発します。
https://techweb.rohm.co.jp/knowledge/si/s-si/03-s-si/5277
ゲートの閾値(Vth)以外にも変化の要素はありますが、おもちゃの動作には一番影響が出そうという点でMOSトランジスタ閾値の挙動をあげます。
おもちゃが、完全に動かなくのではなく、動作がおかしいや時々動いたりするような場合、当初設計した際のMOSトランジスタの製造ターゲットが経年での通電で経年変化し温度特性が変わったとします。
説明のため、先のURL記事の温度特性のグラフ(Junction Temperature)が右に 50℃分(マス目2つ分)シフトしたようなイメージを想定します。実際は、こんなに単純でなくもっと複雑です。※簡単のため、下図の赤線をイメージ。
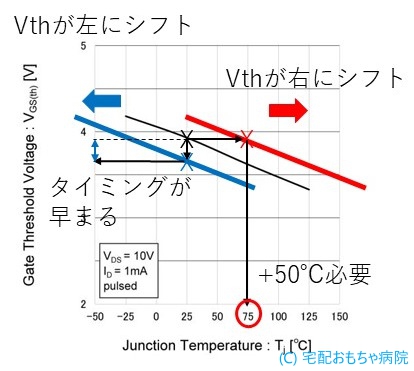
そうすると、当初は正常に動いていたとしても温度特性が変わっているので、例えば室温の25℃で、当初3.8V程度でONしていたMOSトランジスタが、ONせず動作不良を起こします。
そこで加温+50℃をすると、シフトした温度特性のグラフ位置でいうと、75℃でONするようになるので、正常に動作しはじめます。
ですが、温度が冷めると、また動作しなくなります。これは、ドライヤーの加温以外にも半田ごてでの加温も含まれます。
経年変化での温度特性のグラフが右にシフトした場合は、加温で動作するようになります。
劣化によってどちらにシフトするかは、物性の世界(製造ルールや素材や動作条件)になり、これらの解析結果は、 企業秘密などの知財となります。
因みに、左にシフトした場合は、VthのONタイミングが、早まりますので、その影響が現れます。
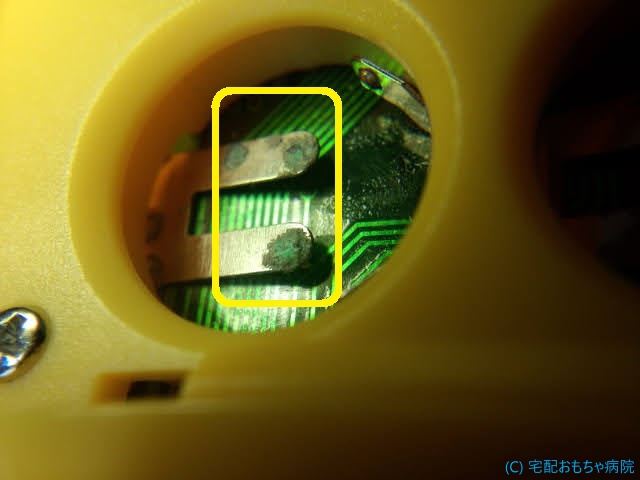
②ワイヤーボンディングと封入材について
シリコンパットと基板のパットをおもちゃの場合おそらくアルミ線を静電気で圧着します。
信頼性が高く求められる車載や医療機器などの半導体では、金線やバンプ接続かと思われますが、如何せんおもちゃへの適用なので、費用対コストで低価格の材料と品質もそれほど求められていないと容易に推測できます。
封入した樹脂が低品質であれば、経年などで劣化し、応力でワイヤーが切れたり、圧着したパットから剥がれたりします。
メーカーでは、故障解析でよくX線撮影して状況を目視確認したりします。 これらは、ランダム性の不良として、バスタブ曲線の底面で現れます。
おもちゃに使用されている、COB内のワイヤーボンディングも同様にランダム性の故障がおき、まったく動かなく原因の一つと考えられます。
こちらも温度係数を持っている場合は、完全に断線していないが、かつかつで接触している場合です。
相手は金属なので温度変化で膨張や収縮をしますので、例えば、ワイヤーボンディングが、パットから剥がれて全く動かなくなっていたのが、暖めることによってパットにワイヤーが接触し動作し始めるような感じです。
こちらも冷めるとまた離れますので、また動かなくなります。
ワイヤーボンディングの接触不良の場合、完全に動かなく場合が多いかと思いますが、封入材の劣化でワイヤー同士が近接し容量を持った場合は、例えばデジタル信号がなまったりして、動作不良が起きる可能性もあると思います。
以上が、考察回答の内容となります。
COB内は、デキャップ(樹脂を薬品で溶かし内部を露出すること)でもしない限り、不具合の原因は分かりませんので、おもちゃ修理の場合は、自身のスキルでできる範囲と掛けられるコストと時間との兼ね合いで最終的には決めることになりそうです。
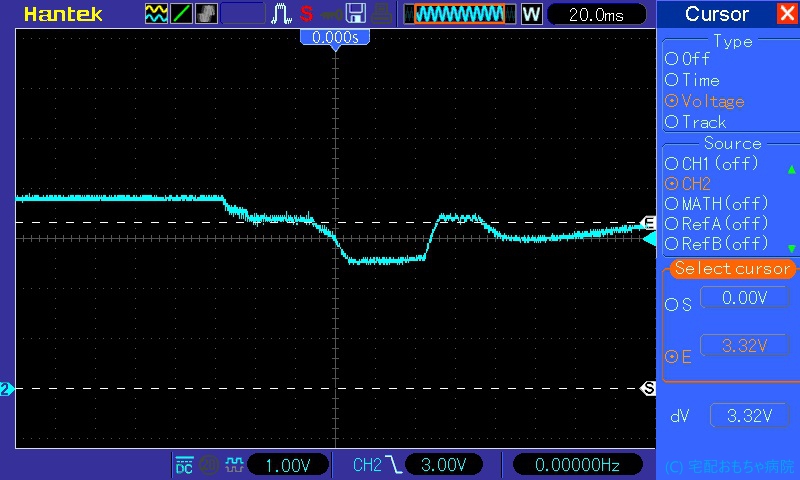
今回は、温度という切り口でしたが、外付けの発振回路があるようなマイコンなどでは、この発振周波数を落としてあげると動き出すという不良モードもあります。
いわゆる設計時のタイミング制約違反が起き、セットアップが足りないとか、ホールエラーとか現場では呼ばれています。
この場合のMOSトランジスタの速度劣化が原因であるのですが、長年この手の不良解析や半導体の設計開発経験が、おもちゃ修理に活かせる日が来るとは、思ってもおりませんでした。